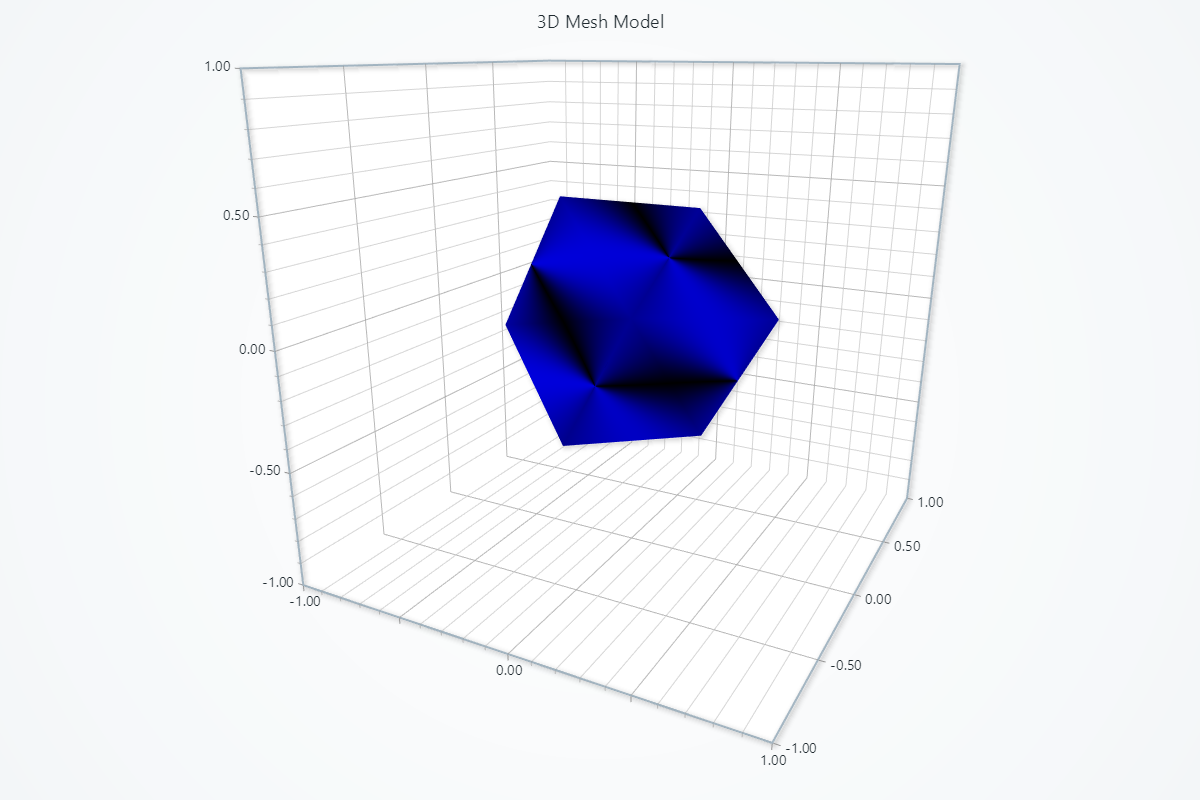
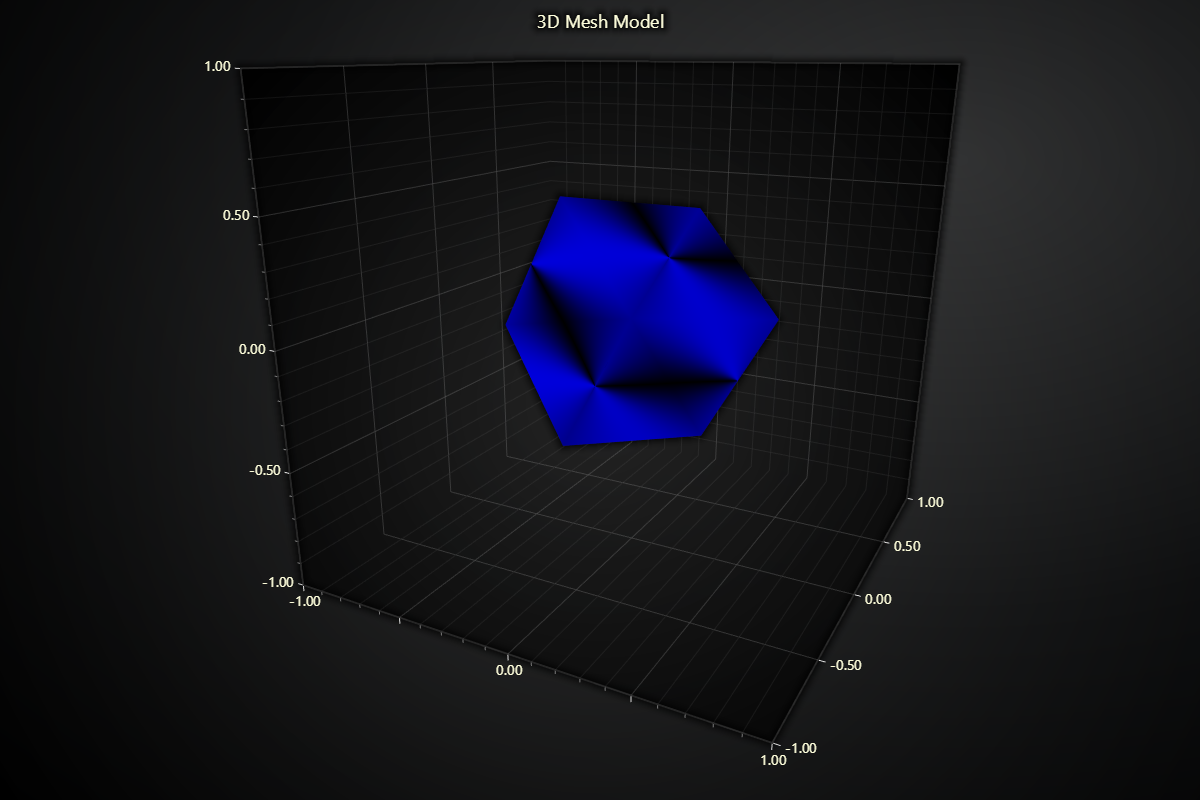
3D Mesh Model
To see how 3D objects can be loaded from files, see this example.
import lightningchart as lc
# Set your license key here
lc.set_license('my-license-key')
# Create the 3D chart
chart = lc.Chart3D(title="3D Cube Model", theme=lc.Themes.Light)
# Define the vertices of a cube (8 points)
vertices = [
-1, -1, -1, # Vertex 0
1, -1, -1, # Vertex 1
1, 1, -1, # Vertex 2
-1, 1, -1, # Vertex 3
-1, -1, 1, # Vertex 4
1, -1, 1, # Vertex 5
1, 1, 1, # Vertex 6
-1, 1, 1, # Vertex 7
]
# Define the indices of the triangles that make up the cube faces
indices = [
0, 1, 2, 2, 3, 0, # Front face
4, 5, 6, 6, 7, 4, # Back face
0, 4, 7, 7, 3, 0, # Left face
1, 5, 6, 6, 2, 1, # Right face
3, 2, 6, 6, 7, 3, # Top face
0, 1, 5, 5, 4, 0 # Bottom face
]
# Set up normals for basic lighting, just pointing outward from each face
normals = [
0.0, 0.0, -1.0, # Normal for front face
0.0, 0.0, 1.0, # Normal for back face
-1.0, 0.0, 0.0, # Normal for left face
1.0, 0.0, 0.0, # Normal for right face
0.0, 1.0, 0.0, # Normal for top face
0.0, -1.0, 0.0 # Normal for bottom face
] * 4 # Repeat normals for each vertex per face
# Add the mesh model to the chart
mesh_model = chart.add_mesh_model()
mesh_model.set_model_geometry(vertices=vertices, indices=indices, normals=normals)
mesh_model.set_scale(0.1) # Uniform scaling of the cube
mesh_model.set_model_location(0, 0, 0)
mesh_model.set_model_rotation(45, 45, 45)
mesh_model.set_color('blue')
chart.open()
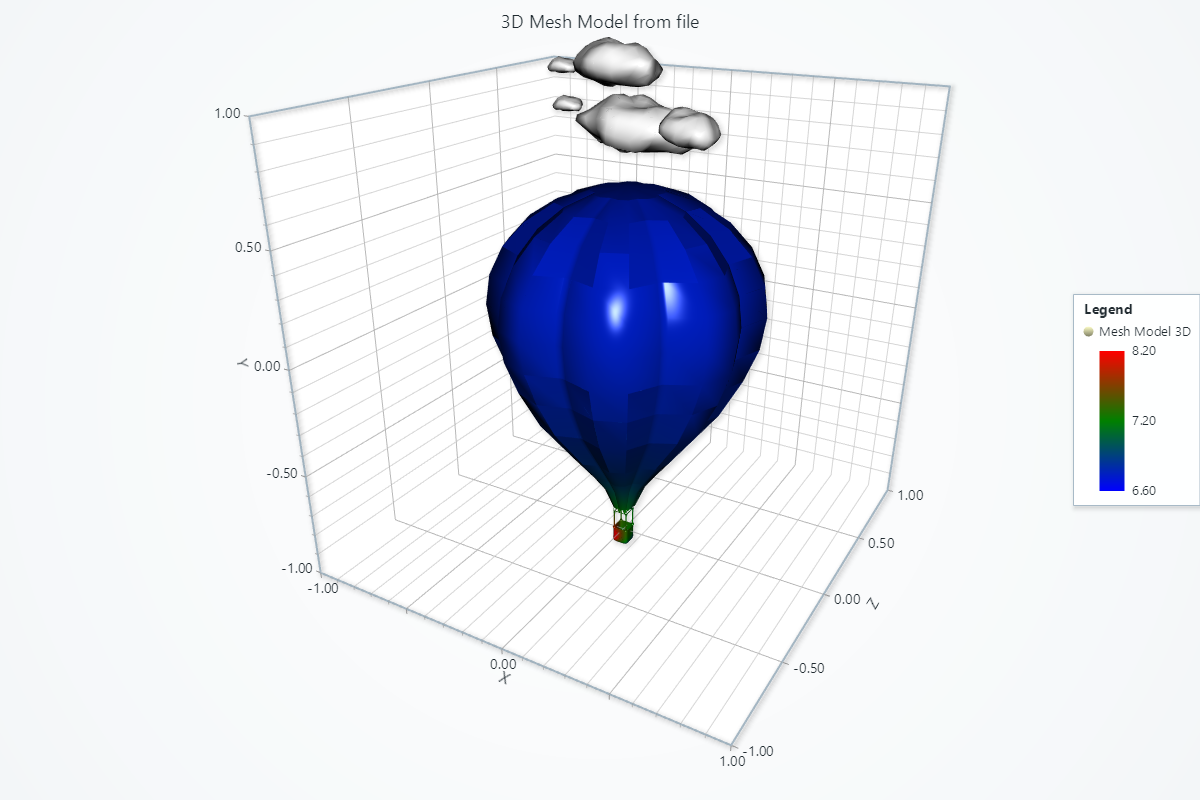
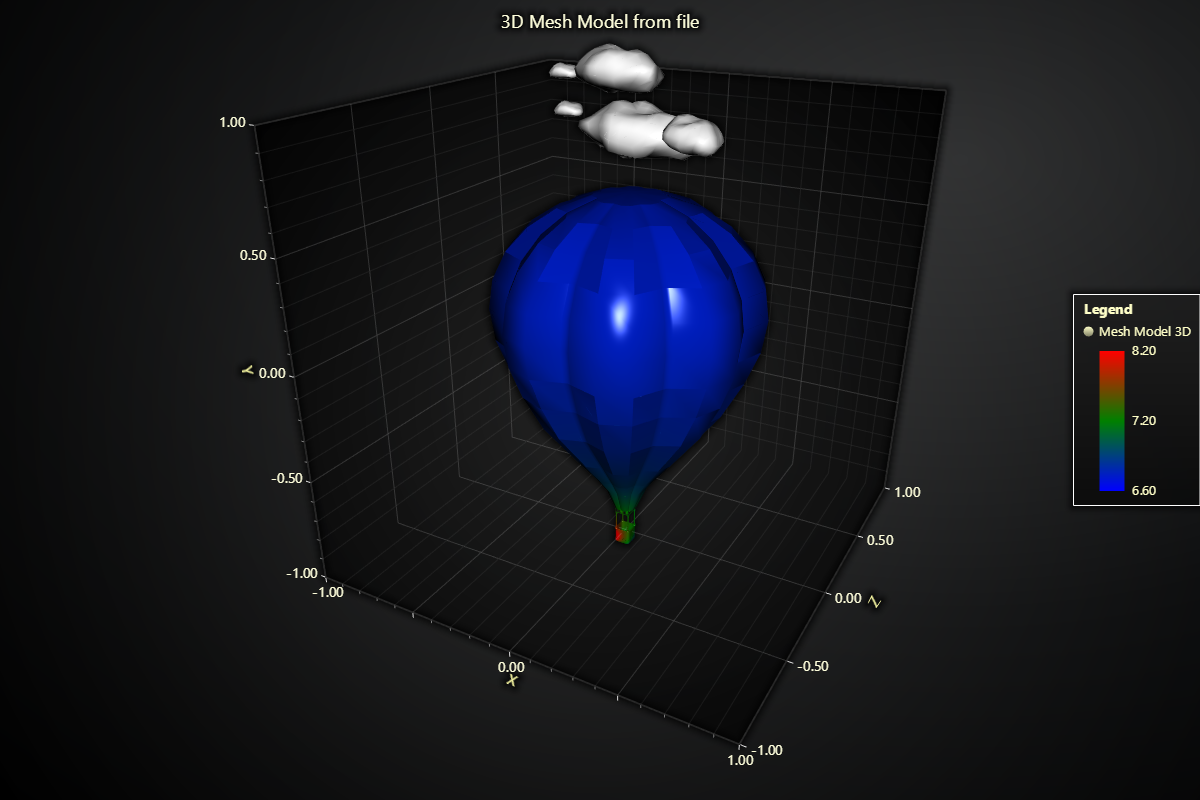
3D mesh model from file
import lightningchart as lc
import numpy as np
import trimesh
lc.set_license('my-license-key')
# Create the 3D Chart
chart = lc.Chart3D(title="3D Hot Air Balloon with Cloud", theme=lc.Themes.Light)
# Add the mesh model to the chart
balloon_model = chart.add_mesh_model()
# Load the obj file
balloon_obj_path = 'Path to Balloon.obj'
# Load the scene
balloon_scene = trimesh.load(balloon_obj_path)
# If a scene is returned, merge to a single mesh:
if isinstance(balloon_scene, trimesh.Scene):
balloon_mesh = balloon_scene.dump(concatenate=True)
else:
balloon_mesh = balloon_scene
# Get the vertices, indices, and normals and set them to the model
balloon_vertices = balloon_mesh.vertices.flatten().tolist()
balloon_indices = balloon_mesh.faces.flatten().tolist()
balloon_normals = balloon_mesh.vertex_normals.flatten().tolist()
balloon_model.set_model_geometry(vertices=balloon_vertices, indices=balloon_indices, normals=balloon_normals)
# Set scale and location
balloon_model.set_scale(0.015)
balloon_model.set_model_location(0,-0.2,0)
balloon_model.set_model_rotation(0, 0, 0)
# Set shading style
balloon_model.set_color_shading_style(
phong_shading=True,
specular_reflection=0.8,
specular_color=(255, 255, 255)
)
# Set color palette
balloon_model.set_palette_coloring(
steps=[
{'value': 6.6, 'color': 'blue'}, # Blue
{'value': 7.2, 'color': 'green'}, # Green
{'value': 8.2, 'color': 'red'}, # Red
],
look_up_property='value',
interpolate=True
)
# Set sensor values to look up the color
sensors = [
{'x': -0.8, 'y': 1, 'z': 0.8, 'value': 10},
{'x': -0.8, 'y': 0, 'z': 0.8, 'value': 7},
{'x': -0.8, 'y': -1, 'z': 0.8, 'value': 3},
]
# Calculate the distance between two points
def calculate_distance(x1, y1, z1, x2, y2, z2):
return np.sqrt((x2 - x1)**2 + (y2 - y1)**2 + (z2 - z1)**2)
# Generate vertex values
def generate_vertex_values():
vertex_values = []
for i in range(0, len(balloon_vertices), 3):
x = balloon_vertices[i]
y = balloon_vertices[i + 1]
z = balloon_vertices[i + 2]
value_sum = 0
weight_sum = 0
for sensor in sensors:
dist = calculate_distance(x, y, z, sensor['x'], sensor['y'], sensor['z'])
weight = 1 / (dist + 0.01)
value_sum += sensor['value'] * weight
weight_sum += weight
vertex_value = value_sum / weight_sum
vertex_values.append(vertex_value)
return vertex_values
# Set vertex values
balloon_model.set_vertex_values_from_array(generate_vertex_values())
# ---------(Cloud) -----------------
# Add the mesh model to the chart
cloud_model = chart.add_mesh_model()
# Load the obg file
cloud_obj_path = 'Path to Cloud.obj'
# Load the scene
cloud_scene = trimesh.load(cloud_obj_path)
# check if the scene is a scene
if isinstance(cloud_scene, trimesh.Scene):
cloud_mesh = cloud_scene.dump(concatenate=True)
else:
cloud_mesh = cloud_scene
# Get the vertices, indices, and normals and set them to the model
cloud_vertices = cloud_mesh.vertices.flatten().tolist()
cloud_indices = cloud_mesh.faces.flatten().tolist()
cloud_normals = cloud_mesh.vertex_normals.flatten().tolist()
cloud_model.set_model_geometry(vertices=cloud_vertices, indices=cloud_indices, normals=cloud_normals)
# Set scale and location
cloud_model.set_scale(0.000015)
cloud_model.set_model_location(0,1,0)
cloud_model.set_model_rotation(0, 0, 0)
# Set color palette
cloud_model.set_color('white')
# Set axis titles
chart.get_default_x_axis().set_title('X')
chart.get_default_y_axis().set_title('Y')
chart.get_default_z_axis().set_title('Z')
chart.open()